 |
QPMS
Electromagnetic multiple scattering library and toolkit.
|
|
QPMS
Electromagnetic multiple scattering library and toolkit.
|
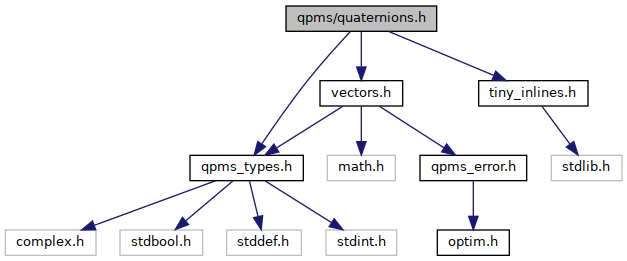
Quaternions and Wigner matrices. More...
Go to the source code of this file.
Macros | |
| #define | QPMS_QUAT_ATOL (1e-10) |
| Just some arbitrarily chosen "default" value for quaternion comparison tolerance. | |
Typedefs | |
| using | q = qpms_quat_normalise(q) |
Functions | |
| static qpms_quat_t | qpms_quat_2c_from_4d (qpms_quat4d_t q) |
| Conversion from the 4*double to the 2*complex quaternion. | |
| static qpms_quat4d_t | qpms_quat_4d_from_2c (qpms_quat_t q) |
| Conversion from the 2*complex to the 4*double quaternion. | |
| static qpms_quat_t | qpms_quat_mult (qpms_quat_t p, qpms_quat_t q) |
| Quaternion multiplication. More... | |
| static qpms_quat_t | qpms_quat_add (qpms_quat_t p, qpms_quat_t q) |
| Quaternion addition. | |
| static qpms_quat_t | qpms_quat_sub (qpms_quat_t p, qpms_quat_t q) |
| Quaternion substraction. | |
| static qpms_quat_t | qpms_quat_exp (const qpms_quat_t q) |
| Exponential function of a quaternion. | |
| Quaternion scaling with a real static number qpms_quat_t | qpms_quat_rscale (double s, qpms_quat_t q) |
| Quaternion static conjugation qpms_quat_t | qpms_quat_conj (const qpms_quat_t q) |
| Quaternion static norm double | qpms_quat_norm (const qpms_quat_t q) |
| Test approximate equality of static quaternions bool | qpms_quat_isclose (const qpms_quat_t p, const qpms_quat_t q, double atol) |
| Standardises a quaternion to have the largest component static positive qpms_quat_t | qpms_quat_standardise (qpms_quat_t p, double atol) |
| Test approximate equality of standardised so that f q f is considered equal to f $q static f bool | qpms_quat_isclose2 (const qpms_quat_t p, const qpms_quat_t q, double atol) |
| Norm of the quaternion | imaginary (vector) part. static inline double qpms_quat_imnorm(const qpms_quat_t q) |
| Quaternion normalisation to unit static norm qpms_quat_t | qpms_quat_normalise (qpms_quat_t q) |
| Logarithm of a static quaternion qpms_quat_t | qpms_quat_log (const qpms_quat_t q) |
| Quaternion power to a real static exponent qpms_quat_t | qpms_quat_pow (const qpms_quat_t q, const double exponent) |
| Quaternion static inversion qpms_quat_t | qpms_quat_inv (const qpms_quat_t q) |
| Make a pure imaginary quaternion from a cartesian static vector qpms_quat_t | qpms_quat_from_cart3 (const cart3_t c) |
| Make a cartesian vector from the imaginary part of a static quaternion cart3_t | qpms_quat_to_cart3 (const qpms_quat_t q) |
| return | qpms_quat_to_cart3 (qpms_quat_mult(q, qpms_quat_mult(vv, qc))) |
| Versor quaternion from rotation | vector (norm of the vector is the rotation angle). static inline qpms_quat_t qpms_quat_from_rotvector(cart3_t v) |
| Wigner D matrix element from a rotator quaternion for integer a l complex double | qpms_wignerD_elem (qpms_quat_t q, qpms_l_t l, qpms_m_t mp, qpms_m_t m) |
| A VSWF representation element of the | O (3) group. complex double qpms_vswf_irot_elem_from_irot3(const qpms_irot3_t q |
| static int | qpms_irot3_checkdet (const qpms_irot3_t p) |
| Improper rotation static multiplication qpms_irot3_t | qpms_irot3_mult (const qpms_irot3_t p, const qpms_irot3_t q) |
| Improper rotation inverse static operation qpms_irot3_t | qpms_irot3_inv (qpms_irot3_t p) |
| Improper rotation power f p n static f qpms_irot3_t | qpms_irot3_pow (const qpms_irot3_t p, int n) |
| Test approximate equality of static irot3 bool | qpms_irot3_isclose (const qpms_irot3_t p, const qpms_irot3_t q, double atol) |
| Apply an improper rotation onto a cartesian static vector cart3_t | qpms_irot3_apply_cart3 (const qpms_irot3_t p, const cart3_t v) |
| versor representing rotation around z static axis qpms_quat_t | qpms_quat_zrot_angle (double angle) |
| versor representing rotation f C_N k i e of angle f pi k N f around z static axis qpms_quat_t | qpms_quat_zrot_Nk (double N, double k) |
| Rotation around z static axis qpms_irot3_t | qpms_irot3_zrot_angle (double angle) |
| Rotation f C_N k i e of angle f pi k N f around z static axis qpms_irot3_t | qpms_irot3_zrot_Nk (double N, double k) |
Variables | |
| Quaternion real static unit const qpms_quat_t | QPMS_QUAT_1 = {1, 0} |
| Quaternion imaginary unit static i const qpms_quat_t | QPMS_QUAT_I = {0, I} |
| Quaternion imaginury unik static j const qpms_quat_t | QPMS_QUAT_J = {0, 1} |
| Quaternion imaginary unit static k const qpms_quat_t | QPMS_QUAT_K = {I, 0} |
| Test approximate equality of standardised | quaternions |
| const qpms_quat_t | qc = qpms_quat_conj(q) |
| const qpms_quat_t | vv = qpms_quat_from_cart3(v) |
| A VSWF representation element of the qpms_l_t | l |
| < The O(3) element in the quaternion representation. | |
| A VSWF representation element of the qpms_l_t qpms_m_t | mp |
| A VSWF representation element of the qpms_l_t qpms_m_t qpms_m_t | m |
| A VSWF representation element of the qpms_l_t qpms_m_t qpms_m_t bool | pseudo |
| < Determines the sign of improper rotations. True for magnetic waves, false otherwise. | |
| static Identity const qpms_irot3_t | QPMS_IROT3_IDENTITY = {{1, 0}, 1} |
| f pi f rotation around x static axis const qpms_irot3_t | QPMS_IROT3_XROT_PI = {{0, I}, 1} |
| f pi f rotation around y static axis const qpms_irot3_t | QPMS_IROT3_YROT_PI = {{0, 1}, 1} |
| f pi f rotation around z static axis const qpms_irot3_t | QPMS_IROT3_ZROT_PI = {{I, 0}, 1} |
| Spatial static inversion const qpms_irot3_t | QPMS_IROT3_INVERSION = {{1, 0}, -1} |
| yz plane mirror static symmetry const qpms_irot3_t | QPMS_IROT3_XFLIP = {{0, I}, -1} |
| xz plane mirror static symmetry const qpms_irot3_t | QPMS_IROT3_YFLIP = {{0, 1}, -1} |
| xy plane mirror static symmetry const qpms_irot3_t | QPMS_IROT3_ZFLIP = {{I, 0}, -1} |
| versor representing rotation f C_N k | f |
Quaternions and Wigner matrices.
| A VSWF representation element of the O | ( | 3 | ) | const |
TODO more doc.
|
inlinestatic |
\[ q^{-1} = \frac{q*}{|q|}. \]
|
inlinestatic |
Quaternion multiplication.
\[ (P Q)_a = P_a Q_a - \bar P_b Q_b, \]
\[ (P Q)_b = P_b Q_a + \bar P_a Q_b. \]
|
inlinestatic |
This is to remove the ambiguity stemming from the double cover of SO(3).
| Wigner D matrix element from a rotator quaternion for integer a l complex double qpms_wignerD_elem | ( | qpms_quat_t | q, |
| qpms_l_t | l, | ||
| qpms_m_t | mp, | ||
| qpms_m_t | m | ||
| ) |
The D matrix are calculated using formulae (3), (4), (6), (7) from http://moble.github.io/spherical_functions/WignerDMatrices.html